9. УПРАВЛЕНИЕ РИСКОМ В ОРГАНИЗАЦИОННЫХ ПРОЕКТАХ
этому классу механизмов принадлежат внешние и внутренние экономические механизмы, направленные на снижение уровня риска: стимулирования, налогообложения, квотные, резервирования и другие. Второй класс механизмов - механизмы перераспре - деления риска (страхования), направленные в первую очередь не на снижение уровня риска, а на снижение отрицательных последствий наступления неблагоприятных событий.
Следовательно, при использовании тех или иных механизмов управления (под механизмом понимается совокупность правил и процедур принятия управленческих решений [86]) ОП следует, наряду с эффективностью управления, анализировать его надежность. Под надежностью механизма будем понимать его свойство, состоящее в способности обеспечивать принадлежность основных параметров системы, включающей как управляющий орган (что, как отмечалось выше, чрезвычайно важно именно для ОП), так и управляемый субъект, заданной области в процессе ее функционирования. Числовой характеристикой надежности механизма управления ОП может служить вероятность выхода существенных параметров системы из допустимого множества при заданном управлении. Получаем многокритериальную задачу принятия решений, которая рассматривается в докладе для ряда частных случаев ОП. Основным методом исследования при этом является теоретико-игровое [48] и теоретико-графовое моделирование [23], основным результатом - совокупность методик совместной оценки надежности и эффективности различных механизмов управления ОП.
Для того чтобы понять специфическую роль надежности и риска как характеристики функционирования некоторой системы, необходимо вспомнить определение эффективности функционирования (эффективности управления).
Предположим, что имеется некоторая детерминированная система - активная или пассивная. Выделим в этой системе управляющий орган и управляемый объект (критерием такого разделения является возможность управляющего органа целенаправленно влиять на состояние управляемого объекта посредством выбора управляющих воздействий). Обозначим y е A - состояние управляемого объекта, P(s) - множество состояний этого объекта, зависящее от управляющего воздействия s е M, принадлежащего допустимому множеству M (при использованииуправления s управляемый объект оказывается в одной из точек множества P(s)). Введем на множестве A XM скалярный (для простоты) функционал K(y, S): A XM ® Ж1, который назовем критерием эффективности функционирования системы. Критерий эффективности сопоставляет каждому значению пары «состояние - управление» действительное число, причем считается, что вид функционала K(-,-) таков, что чем больше это число, тем «лучше» (естественно, с чьей-то фиксированной точки зрения - например, центра - см. ниже). Величину
K(s) = max K(y, s)
yeP(s)
называют эффективностью управления s е M (эффективностью механизма управления), а величину Kg(s) = min K(y, s) - гаранти-
yeP(s)
рованной эффективностью управления [86].
Задача управления (точнее - задача синтеза оптимального управляющего воздействия) заключается в выборе такого s е M, на котором бы достигался максимум (1), то есть оптимальным считается управление, имеющее максимальную эффективность. Обозначим решение задачи управления
s* = arg max K(s) = arg max { max K(y,s)}.
s eM s eM yeP(s)
Отметим, что до сих пор при определении эффективности управления мы не делали различий между активными и пассивными системами. Обсудим теперь специфику каждого из этих классов систем.
Каждая система - активная или пассивная - может рассматриваться как черный ящик, для которого известна реакция P(s) (выход - состояние системы) на входное воздействие (вход - начальное состояние и/или управление).
В пассивной системе (не содержащей ни одного управляемого объекта, который обладал бы свойством активности, то есть - способностью к целенаправленному поведению), например - в динамической системе, задаваемой уравнением x = G(x, s), множество P(s) определяется функцией G(x, s).
В активной системе P(s) является множеством решений игры управляемых активных элементов, то есть, например, в одноэле-
ментной активной системе P(s) = Arg max fy, s), где f(v) - целе-
yeA
вая функция активного элемента [86].
В многоэлементной АС P(s) может быть равновесием Нэша игры элементов при заданном управлении со стороны центра [90], в динамической АС - дисконтированной полезностью агента [87] и т.д.В пассивной системе критерий эффективности K(-,-) отражает цель управления, определяемую создателем системы управления. В активных системах предполагается, что критерий эффективности отражает интересы активного субъекта - управляющего органа (центра). Схожесть источников возникновения критериев эффективности в обоих типах систем является объяснением отождествления интересов центра и интересов АС в целом, а также отождествления интересов оперирующей стороны (центра) и интересов исследователя операций [43, 48].
Таким образом, с точки зрения формального определения эффективности управления активная и пассивная системы, практически, неразличимы. Содержательные различия заключаются в том, что в активной системе критерий эффективности и множество управляемых состояний элементов зависят, соответственно, от предпочтений центра и предпочтений активных элементов, в то время как в пассивной системе описание системы или ее модели подразумевает явное задание этих характеристик.
Кратко рассмотрев основные подходы к определению эффективности управления, перейдем, следуя [82], к определению понятия надежности механизма управления социально-экономической системой.
В энциклопедическом словаре приведено следующее определение надежности технических систем. «Надежность - комплексное свойство технического объекта; состоит в его способности выполнять заданные функции, сохраняя свои характеристики в установленных пределах» [СЭС, М.: Советская энциклопедия, 1988. С. 855]. Аналогичное определение может быть сформулировано и для социально-экономических систем [82]. Надежностью механизма управления организационной системой будем называть его свойство, состоящее в способности обеспечивать принадлежность основных параметров системы некоторой (заданной, допустимой и т.д.) области в процессе ее функционирования.
Такимобразом, определение надежности подразумевает задание совокупности параметров ее функционирования (действий, состояний, результатов деятельности и т.д., которые считаются «основными») и фиксацию некоторой области значений этих параметров, которая считается допустимой . Двойственным к надежности является понятие риска - вероятности нарушения основными параметрами системы границ заданной области. В то же время, риск может рассматриваться как мера (числовая характеристика) надежности.
Отметим, что о надежности имеет смысл говорить только в том случае, когда результаты деятельности системы (ее основные параметры) зависят от случайных или неопределенных факторов. Поясним последнее утверждение.
Приведенное выше определение эффективности управления вводилось для детерминированных систем, то есть таких систем, деятельность которых не зависит (реально или в рамках некоторой модели) от неизвестных факторов. При этом возможно полное отождествление допустимой (с точки зрения надежности) и желательной (с точки зрения критерия эффективности) областей значений основных параметров функционирования системы. Иными словами, для детерминированных систем определения надежности и эффективности «совпадают» - условно можно считать, что определение эффективности для этого класса систем автоматически включает определение надежности, то есть максимизация эффективности эквивалентна максимизации надежности. Сложнее дело обстоит с недетерминированными системами, к рассмотрению которых мы и переходим.
Предположим, что управляющему органу известна модель поведения управляемого объекта с точностью до некоторого параметра в е W, относительно которого известно, что он заведомо принадлежит множеству W. Этот неизвестный параметр будем называть состоянием природы. Содержательно, неопределенный (с точки зрения управляющего органа) параметр может быть внешним по отношению к системе и отражать влияние на нее окружающей среды (при этом значения состояния природы могут быть известны управляемому объекту - симметричная информированность, или неизвестны - асимметричная информированность [86, 88]), или быть внутренним и отражать неполную информированность управляющего органа об управляемом объекте.
Таким образом, состояние системы зависит от управления и неопределенного параметра, то есть P = P(s, в).
Следовательно, критерий эффективности функционирования K(-,-) также должен зависеть от неопределенного параметра:K(y, s, в): A XMX W ® Ж1, и эффективность управления, в свою очередь, должна зависеть от этого параметра (ср. с (1)):
K(s в) = max K(y, s, в).
yeP(s ,в)
Величина (3) может рассматриваться как косвенная оценка надежности механизма управления s. Действительно, критерий сравнения надежностей различных механизмов управления может быть сформулирован следующим образом : механизм s1 е M обладает большей надежностью, чем механизм s2 е M (обозначим s1 f s 2), если
"в е W K(oh в) >K(s2, в).
Функционал (3) (точнее - отношение " f ", определяемое (4)), зависящий от двух переменных - управления и состояния природы, одновременно учитывает обе основных характеристики функционирования системы - соответственно, эффективность и надеж-ность. Если существует такое допустимое управление s\' е M,
которое является максимальным по отношению " f " на множестве M, то есть при любом состоянии природы имеет эффективность, большую, чем любое другое управление ("s е M о\' f s), то можно считать, что задача максимизации эффективности эквивалентна задаче максимизации надежности. При этом управление s\' условно можно назвать идеальным (абсолютно оптимальным или доминантным - по аналогии с доминантными стратегиями в теории игр [48, 133]) - независимо от условий функционирования оно обеспечивает максимальную эффективность, то есть гарантированно является максимально надежным. Однако в большинстве случаев идеального управления не существует.
Для существования идеального управления необходима полнота и транзитивность отношения "f" в смысле (4). Понятно, что в общем случае (и в большинстве случаев, наблюдаемых на практике) может иметь место: $ si Ф s2 е M, $ в1 Ф в2е W: K(sh в]) >K(o2, в]), K(s2, в2) > K(si, в2).
Содержательно, в различных условиях оптимальными могут оказываться различные управления. Отсутствие идеального управления делает задачу синтеза оптимального управления, обладающего максимальной надежностью «не решаемой» в общем виде.
Поясним это утверждение.Зависимость эффективности управления (3) от состояния природы превращает задачу синтеза оптимального управления в двух- критериальную. В то же время известно, что универсальных методов решения многокритериальных задач не существует (единственная общепризнанная рекомендация - выделение множества решений, эффективных по Парето).
Если по аналогии с (2) максимизировать критерий (3) на множестве допустимых управлений, то получим параметрическое управление:
(5) s*(0) = arg max K(s, в) = arg max { max K(y, s, в)}.
s eM seM yeP (s ,в)
Если на момент принятия решения управляющим органом (или, в случае асимметричной информированности, после наблюдения состояния управляемого объекта) конкретное значение состояния природы становится ему известно, то возможно использование параметрических решений вида (5). При этом эффективность
управления равна эффективности управления в условиях полной информированности [82, 88].
Если же реализация состояния природы остается неизвестной управляющему органу, то использование механизмов с параметрическим управлением невозможно. Поэтому в большинстве работ по теоретико-игровому моделированию организаций используется следующий подход.
Предположим, что управляющий орган производит переход от критерия K(s в), определяемого (3) и зависящего от состояния природы, к детерминированному критерию K(s) с помощью некоторой процедуры "^>" устранения неопределенности [27, 88]: K(s в) K(s), после чего решает детерминированную задачу синтеза оптимального управления (2). Возможность использования той или иной процедуры устранения неопределенности определяется имеющейся информацией. Иными словами в рамках рассмат-риваемых формальных моделей поведения считается, что выполнена гипотеза детерминизма [48]. Полная информированность в данном случае означает зависимость оптимизируемого критерия только от, во-первых, фиксированных значений существенных внутренних и внешних параметров, стратегий остальных участников системы и т.д., и, во-вторых, от единственной «свободной» переменной - стратегии самого лица, принимающего решение. Приведенное положение используется во всех моделях теории игр - производя выбор своей стратегии, игрок, так или иначе, вынужден делать предположения о поведении других игроков (см. обсуждение различных концепций равновесия в [48, 131, 133 и др.]).
Следует признать, что в действительности при оценке ситуации и принятии решений любой субъект использует множество критериев. Вводимое в формальных моделях предположение о полной информированности (единственности и скалярности оптимизируемого критерия) обусловлено отсутствием, за исключением небольшого числа очень частных случаев (см. ссылки в [82]), общих и адекватных моделей принятия решений в условиях неопределенности. Изучение процессов принятия индивидуальных и коллективных решений, а также разработка адекватно описывающих их математических моделей, является актуальной задачей.
Существует множество процедур устранения неопределенности (достаточно полное перечисление можно найти в
[43, 78, 86, 88, 94, 104] и другой литературе по моделям принятия решений в условиях неопределенности ). Приведем три наиболее часто используемые из них.
"Субъективный" критерий эффективности. Управляющий орган подставляет в критерий эффективности (3) свою субъективную (или полученную от экспертов) оценку в\' е W состояния природы. Субъективное решение определяется:
о (в\') = arg max K(o в\').
o eM
Критерий гарантированной эффективности соответствует наиболее пессимистическим расчетам управляющего органа - оптимальное гарантированное решение максимизирует эффективность при наихудшем состоянии природы:
o*g = arg max min K(o в).
o eM в eW
Критерий ожидаемой эффективности может быть использован, если управляющий орган имеет в своем распоряжении распределение р(в) вероятностей состояния природы (это распределение может отражать как его субъективные представления, так и быть полученным в результате обработки статистических данных, например - результатов наблюдений за управляемым объектом и окружающей средой):
s*p = arg max I K(o в) р(в) dв.
se M
W
Если задано множество B с A допустимых состояний управляемой системы и известна плотность р(в) распределения вероятностей состояния природы, то возможно рассчитать риск
r(o()) = Prob {P(o) п (A \\ B) Ф 0},
как числовую характеристику надежности, определяемую вероят-ностью выхода существенных параметров системы из допустимого множества B с A при заданном управлении o е M.
Таким образом, для заданного управления o е M существуют две характеристики: его эффективность K(o) и надежность (точнее
- риск) r(s). Как предлагалось выше, задачу (двухкритериальную) синтеза управлений можно формулировать либо как задачу синтеза управления, имеющего максимальную эффективность при заданном уровне риска:
\\K(S ) ® max
J s eM
{ r(s) < r0
либо как задачу синтеза управления, минимизирующего риск при заданном уровне K0 гарантированной эффективности:
|V(s) ® min
J s eM
{ K (s) > Ko ¦
Очевидно, что если существует идеальное управление (эффективность которого максимальна при любом состоянии природы), то оно является оптимальным по всем приведенным выше частным критериям. С другой стороны, для решения, оптимального по одному из частных критериев, в общем случае может найтись такое состояние природы, при котором некоторое другое решение будет иметь строго большую эффективность.
Таким образом, в рамках формальных моделей на сегодняшний день не существует универсального критерия, позволяющего объединить задачу максимизации эффективности и задачу максимизации надежности. В то же время, принцип детерминизма требует детерминированности задачи принятия решения центром. Следовательно, с одной стороны, эффективность механизма управления (которая, в том числе, может являться сверткой нескольких частных критериев) и надежность механизма управления являются рядоположенными его характеристиками. С другой стороны, при формулировке и решении задачи синтеза оптимального управления, являющейся задачей принятия решений, может использоваться только один критерий, поэтому, основным, наверное, следует считать все-таки «обобщенный критерий эффективности» в широком смысле, явно (в виде ограничений, или в виде процедур устранения неопределенности и т.д.) или неявно включающий в себя как собственно критерий эффективности, так и некоторые показатели надежности.
Так как эффективность и надежность являются «равноправными» характеристиками механизма управления, то возможен альтер-
нативный подход - определить критерий надежности таким (достаточно общим) способом, чтобы он учитывал и включал в себя показатели эффективности, и постулировать, что эффективность механизма управления является «вторичной» по отношению к достаточно широко трактуемой его надежности. Оба двойственных подхода имеют право на существование. При использовании каждого из них любое описание (модель) каждой конкретной организационной системы должно удовлетворять требованию учета в оптимизируемом критерии как показателей эффективности, так и показателей надежности.
Наряду с надежностью отдельных элементов, ключевой характеристикой любой системы, определяющей ее надежность, является избыточность - как элементного состава, так и функций, связей и т.д. Поэтому анализ надежности статических (неадаптивных) систем достаточно прост. Действительно, в статике возможность повышения надежности обусловлена либо увеличением надежности элементов, либо увеличением избыточности [32, 82]. Следует отметить, что повышение надежности посредством увеличения избыточности требует определенных затрат, изменения информационной нагрузки на участников системы, изменения структуры подчиненности и т.д., влияние которых может привести к изменению эффективности управления. Следовательно, возникает оптимизационная задача - определения рационального компромисса между изменениями надежности и эффективности.
Кратко обсудив методологические проблемы определения и анализа надежности и риска в моделях управления организационными системами, перейдем к исследованию специфики управления риском в организационных проектах.
Как отмечалось выше, отличительной (и во многом характеристической) чертой организационных проектов является то, что в них изменяется субъект управления, и наличие изменений, происходящих с субъектом управления (руководителем проекта), является чрезвычайно существенным. Поэтому рассмотрим механизмы управления риском в рамках моделей саморазвития.
Прежде всего, необходимо отметить, что в управлении ОП используется следующая общая технология учета и анализа риска.
На первом этапе решается задача синтеза оптимального механизма управления. Если неопределенные факторы отсутствуют
(модель детерминированная), то ни о каком управлении риском речи не идет. Если в модели присутствуют неопределенные факторы, то может быть получено параметрическое решение задачи синтеза (см. выше). Если значение неопределенного параметра станет известным на момент принятия решений, то возможно непосредственное использование параметрических решений (набор этих решений может использоваться как конструктор [32], те или иные элементы которого используются в зависимости от ситуации). В противном случае возможны два варианта.
На втором этапе центр может устранить неопределенность (см. методы устранения неопределенности выше) и решать детерминированную задачу, то есть рассчитывать на наихудший случай, ожидаемую полезность и т. д. При этом управление риском заключается в анализе зависимости оптимального решения от информации, имеющейся о неопределенном параметре. Методы и примеры такого анализа подробно описаны в [82, 88, 90 и др.].
Альтернативой является исследование зависимости оптимального решения от значений неопределенных параметров, и поиск решения, оптимального в рамках имеющейся информации о возможных значениях неопределенных параметров. Примерами являются: анализ чувствительности (устойчивости) решения по параметрам модели, использование решений, обладающих максимальной гарантированной эффективностью в заданной области значений неопределенных параметров, а также применение обобщенных решений [84].
Последний подход представляется более привлекательным, чем использование решений, оптимальных в условиях неопределенности, так как он предоставляет в распоряжение лица, принимающего решения, гибкий инструмент анализа влияния неопределенных факторов на состояния управляемой системы и эффективность управления. Например, имея диаграммы «риск- эффективность-стоимость», или кривые безразличия эффективности управления на плоскости параметров и т. д. - см. примеры в [4, 25, 44 и др.] и ниже - пример 5, можно сравнивать целесообразность использования тех или иных управлений с учетом имеющейся у центра информации и накопленного им опыта.
На третьем этапе центр производит выбор управлений, реализуется состояние управляемой системы, производится анализ эф-
фективности используемых процедур принятия решений, их корректировка, а затем этапы повторяются с учетом принятых изменений и вновь поступившей информации о неопределенных факторах.
Приведем примеры использования приведенной методики, используя результаты анализа моделей саморазвития, описанных в четвертом разделе настоящей работы.
В рамках модели 1, рассмотренной в четвертом разделе, доказано, что оптимальным реализуемым действием является
х*(Я, a, r) = arg max [Я x - J*(x, a, r)],
xeA0
зависимость целевой функции центра от параметров Я, a и r имеет вид:
F(1, a, r) = Я x*(1, a, r) - ? с^^х*(Я, a, r), a), a, г)
ieI
а задача комплексного развития заключается в следующем:
F(1, a, r) - ca(a0, a) - cr(r0, r) ® max .
reQ, a>0
Неопределенность (недостаточная информированность центра) может иметь место относительно следующих параметров:
целевых функций участников системы и множеств их допустимых стратегий - в этом случае целесообразно использование обобщенных решений по аналогии с тем, как это реализовано в [84];
начального состояния (a0, r0) управляемой системы;
прогноза цен Я;
параметров функций затрат ca(a0h a) и cr(r0, r). Следовательно возникает риск - возможность выхода параметров системы из заданной области, обусловленная незнанием или ошибочными представлениями о перечисленных существенных параметрах.
Рассмотрим способы описания риска и управления им в модели саморазвития на следующем примере (см. также пример 1).
Пример 5. Пусть агенты имеют квадратичные функции затрат
типа Кобба-Дугласа: ci(yi, ri) = y2 /2rit i e I, а оператор агрегирования Q(y, a) = a?yt, W = .
ieI
Тогда, как было вычислено в первом примере, y* (x, Я r) = x ri / aR, где R = X Г , v*(z, a r) = x2 / 2 a2 R,
ieI
x*(1, a, r) = Я a2 R, F(1 a, r) = Я2 a2 R / 2.
Пусть ca(ao, a) = b (a- ao)2, фа, r) = X g, (r - Ги )2.
ie I
Тогда задача развития персонала - при заданных Я, a и r0 определить r е W, максимизирующее целевую функцию центра с учетом затрат cr() на изменение квалификации персонала - имеет вид:
(13) Я2 a2 R / 2 - X 7г (r - ГО,- )2 ® max.
ieI reW
Решение этой задачи:
r, = ro, + Я2 a2 / 4 g,, i е I.
Отметим, что для всех агентов выполнено r, > ri0, то есть происходит повышение квалификации, причем ее прирост r, - ri0 пропорционален внешней цене (при более выгодных внешних условиях выгодно повышать квалификацию) и эффективности a технологии, используемой центром (при неэффективной технологии повышать квалификацию не имеет смысла), и обратно пропорционален «удельным затратам» {g;} на обучение персонала.
Задача развития центра - при заданных Я, r и a0 определить a > 0, максимизирующее целевую функцию центра с учетом затрат Со(-) на изменение технологии - имеет вид:
Я2 a2 R / 2 - b (a - aQ)2 ® max,
a>0
а ее решение:
* 2 В
a = a0 —,
0 2 В - Я R
то есть a > a0 при 2 В > Я R. Последнее условие можно интерпретировать следующим образом: при высокой квалификации персонала и выгодных внешних условиях (соответственно - больших значениях R и Я) можно и не совершенствовать технологию.
Если в рассматриваемой модели присутствует неопределенность, то использование оптимальных управлений в условиях неопределенности означает следующее. Когда относительно параметров модели имеется интервальная неопределенность, то, напри-
мер, в решении (14) следует использовать минимальные (пессимистические) оценки внешних цен l и максимальные оценки «удельных затрат» {gi} на обучение персонала. Если имеется вероятностная неопределенность относительно квалификации персонала R, то так как выражение (15) линейно по этой переменной, можно подставить ожидаемое значение и т.д.
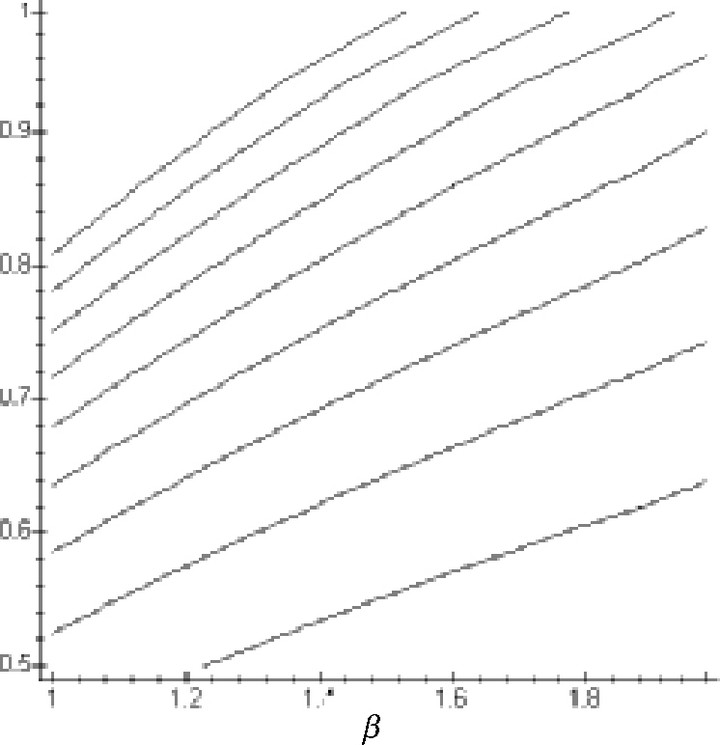
г
Рис. 9. Параметрический анализ решения задачи (15) примера 5
l
Использованию анализа чувствительности (параметрических, сценарных или «многокритериальных» методов) соответствует построение зависимостей решений задач управления от параметров модели и использование центром этих зависимостей для принятия окончательных решений. Примеры таких зависимостей (линии уровня (16)), приведенные для задачи развития центра (15) на рисунках 9 и 10 (при a0 = 1 и R = 1, Ь = 1,5, соответственно), позволяют оценить последствия принимаемых управленческих решений с учетом как эффективности, так и риска.
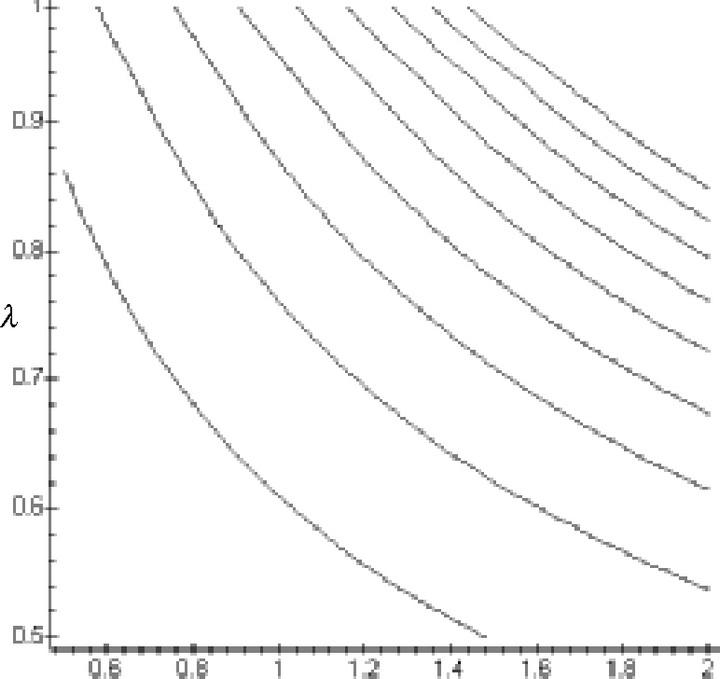
R
Рис. 10. Параметрический анализ решения задачи (15) примера
5На рисунке 11 приведены линии уровня целевой функции центра в зависимости от параметров b и l при a0 = 1, R = 1.
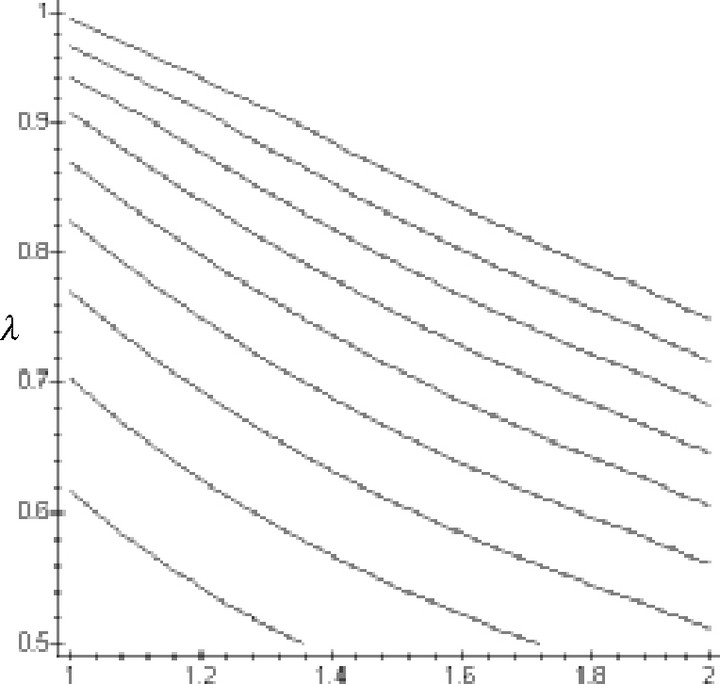
b
Рис. 11. Параметрический анализ эффективности (15) в примере 5
Видно, что, если для каждой комбинации параметров используется соответствующее оптимальное решение, то эффективность управления устойчива по параметрам модели. Если отказаться от этого предположения, и считать, что используется фиксированное решение, например, ос\' ~ /, /. вычисленное в предположении а(/ = 1, R = 1, [5 = 1,5, Я = 0,5, то зависимость эффективности от параметров модели будет иметь вид, приведенный на рисунке 12.
О 8-
Я
07.."
С6--
п 1: i6 I а :
В
Рис. 12. Параметрический анализ эффективности решения a\' »1,1 в примере 5
Зависимость эффективностей F(a ) и F(a\') от параметров Я и В приведена на рисунке 13 (соответственно, верхняя и нижняя поверхности), иллюстрирующем тот факт, что использование фиксированных решений приводит к снижению эффективности. •
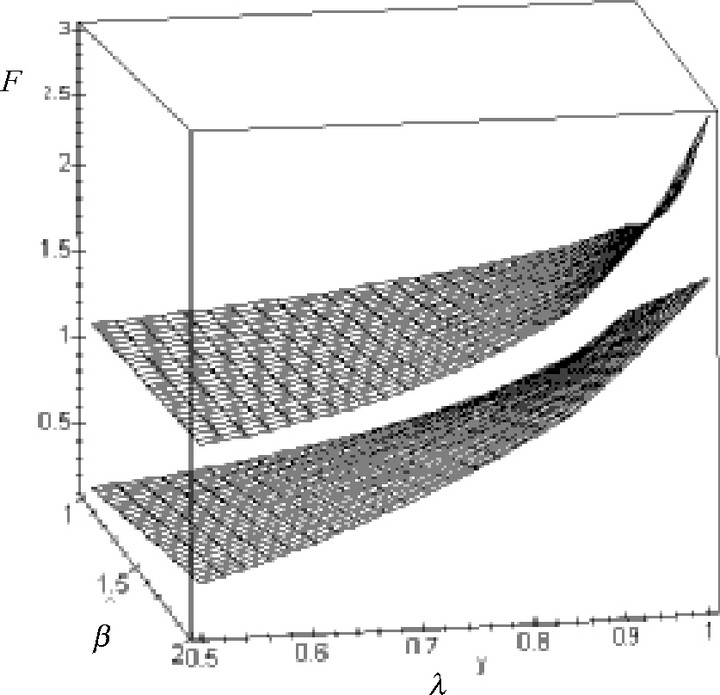
Рис. 13. Сравнительный анализ эффективности
оптимального решения a (см. (16)) и фиксированного решения a\' »1,1 в примере 5
Таким образом, для эффективного управления риском в организационных проектах необходимо комплексное использование параметрического анализа, рассмотрение различных процедур устранения неопределенности и применение обобщенных решений, которые в совокупности дают руководителю проекта необходимую для принятия решений информацию.
Еще по теме 9. УПРАВЛЕНИЕ РИСКОМ В ОРГАНИЗАЦИОННЫХ ПРОЕКТАХ:
- 1.5. Процесс управления проектом и организационная структура
- Позиция 2. Разработка организационной структуры проекта и модели управления.
- Механизмы управления организационными проектами
- Управления риском
- Раздел 3. Управление риском
- Управление риском
- 2.7. Механизмы управления риском
- 2.7. Механизмы управления риском
- Управление рыночным риском.
- Процесс управления риском
- Организационные проекты
- Глава 2.1. Процедуры управления риском