Системы стимулирования K-типа.
Если центр гарантирует агенту значение полезности, равное полезности резервной заработной платы, то компенсаторная система стимулирования sK(t) может быть найдена из следующих соотношений (см. определение множества реализуемых действий выше):
" t: (T - t) е P(C) u( <~K (t), t) = U,
OK(i) = ~K (T- t).
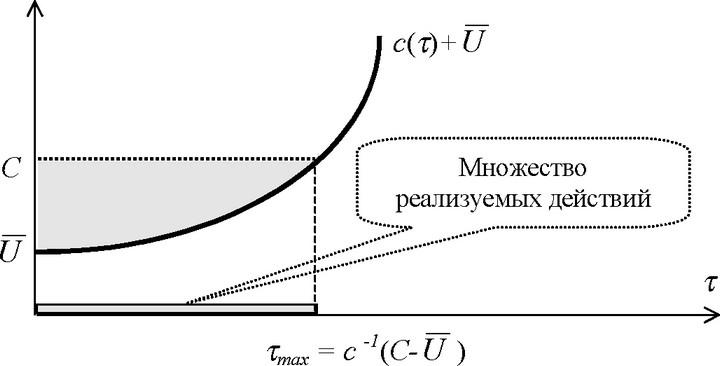
Рис. 25. Множество допустимых вознаграждений
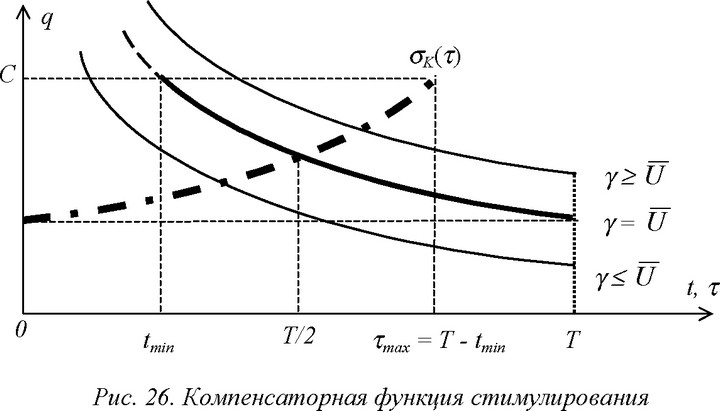
Из (16)-(17) следует, что график функции &к (t) совпадает с кривой безразличия функции полезности, определяемой условием: g = U (см. рисунок 26). Так как кривая безразличия - убывающая и выпуклая, следовательно компенсаторная система стимулирования является возрастающей и выпуклой (см. рисунок 26). Кривая безразличия, соответствующая гарантированной полезности агента U , на рисунке 26 выделена жирной линией.
На рисунке 26 также изображена (жирной штрих-пунктирной линией) компенсаторная функция стимулирования sK(t), соответствующая данной функции полезности агента (отметим, что при
t > tmax = T - tmin = c~\'(C - U ) компенсаторное вознаграждение превысит ограничение C).
Итак, компенсация затрат в модели индивидуальных предпочтений означает, что агент «находится» на изокванте полезности и безразличен между всеми продолжительностями рабочего време-ни. Если выполнена гипотеза благожелательности, то он выберет продолжительность рабочего времени, оговоренную в контракте.
Приведем доказательство оптимальности систем стимулирования К-типа в терминах функции полезности.
Пусть центр хочет побудить агента отработать t часов. Свободное время при этом равно t = T - t. Наличие резервной заработной платы ограничи-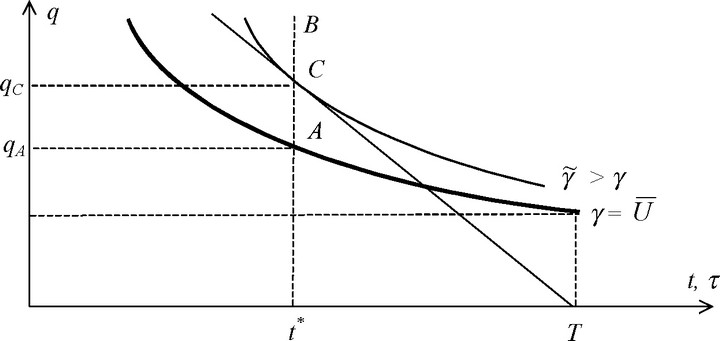
Рис. 27. Оптимальность функции стимулирования К-типа
вает множество возможных значений вознаграждения полуинтервалом АВ (см. рисунок 27).
Задача синтеза оптимальной функции стимулирования сводится к поиску такого бюджетного ограничения, которое касалось бы некоторой кривой безразличия на отрезке АВ, причем желательно, чтобы величина вознаграждения в точке касания была минимальна, то есть чтобы точка касания находилась как можно ближе к точке А, а в идеале - совпадала бы с ней. Кривая безразличия, проходящая через точку А, соответствует ограничению резервной заработной платы. Если рассматривать ее саму как бюджетное ограничение, то получим, что последнему соответству-ет именно компенсаторная система стимулирования. При ее использовании затраты на стимулирование по реализации действия t равны qA (см. рисунок 27).
Если попытаться найти оптимальную пропорциональную систему стимулирования, реализующую то же действие t, то получим, что соответствующим ей бюджетным ограничением является
прямая, касающаяся кривой безразличия g > g = U в точке С (см. рисунок 27). Через точку С проходит кривая безразличия, соответствующая строго большей полезности, чем полезность резервной
заработной платы. Поэтому, хотя пропорциональная система сти-
*
мулирования и реализует действие t , она реализует его с затратами на стимулирование qC, строго большими, чем минимально необходимые. Разность qC - qA показывает насколько переплачивает центр при использовании неотрицательных пропорциональных систем стимулирования по сравнению с компенсаторными. Аналогичные рассуждения можно привести, иллюстрируя их графиками (см. ниже), и относительно эффективности других базовых систем стимулирования в сравнении с компенсаторными и друг с другом.
Из всех базовых систем стимулирования только компенсаторные зависят непосредственно от затрат агента. Поэтому при рас-смотрении остальных базовых систем стимулирования учет полезности агента будет производиться не столь явным образом, как это делалось выше для компенсаторных. Реализуемое действие будем обозначать как и ранее t (t = T - t*). Аналогия приводимых ниже результатов с результатами анализа пропорциональных систем стимулирования следующая - функция поощрения <~(t) является бюджетным ограничением, которого в точке оптимума должна «касаться» кривая безразличия агента.