11. ШКАЛЫ ОПЛАТЫ ТРУДА
При расчетах центра с агентами - работодателя с работниками, заказчика - с исполнителями работ по договору, а также во многих других реальных ситуациях, размер оплаты, получаемой агентом, зависит от процента завершения работ.
В качестве «процента завершения», в частности, могут выступать показатели освоенного объема [6].Предположим, что сумма договора, или стоимость работы или пакета работ согласована центром и агентом и равна C ( напомним, что в скачкообразных системах стимулирования, которые могут интерпретироваться как аккордная форма оплаты труда, величина C являлась ФЗП). Шкалой оплаты труда называется кумулятивная зависимость размера вознаграждения (доли от стоимости договора), выплаченного центром агенту, от процента завершения.
Обозначим через p e [0; 1] процент завершения, через g e [0; 1] - процент от суммы C, выплаченный агенту. Тогда шкалой оплаты труда будет зависимость g(b). Эта зависимость обладает следующими свойствами (содержательные интерпретации которых очевидны):
функция g( ) - неубывающая и непрерывная справа;
Х0) = 0;
Х1) = 1.
Если ввести зависимость o(b) размера вознаграждения, получаемого агентом (а не уже полученного за весь выполненный текущий объем работ) от процента завершения, то, очевидно, что этот размер вознаграждения с точностью до мультипликативной константы (стоимости договора C) совпадает со скоростью изменения уже полученных агентом сумм, то есть, если g() - кусочно- дифференцируемая функция, то
0(b) = C dgb, b e [0; 1].
dp
Верно и обратное соотношение: 1 Г
gp) = - J О(w)dw .
C о
Из выражений (1) и (2) следует, что на участках возрастания О(-) функция g(-) является «выпуклой», на участках убывания О(-) функция g(-) является «вогнутой», а в точке максимума О(-) функция g(\') имеет «перегиб».
Кроме того, очевидно, выполняется «условие нормировки»: 1J О(w)dw = C.
о
Перечислим некоторые типовые шкалы оплаты труда.
Во-первых, это - равномерная оплата, при которой вознаграждение агента за каждую единицу процента завершения одинаково (см. рисунок 46). Отметим, что именно равномерной оплате соот-ветствуют все статические модели стимулирования.
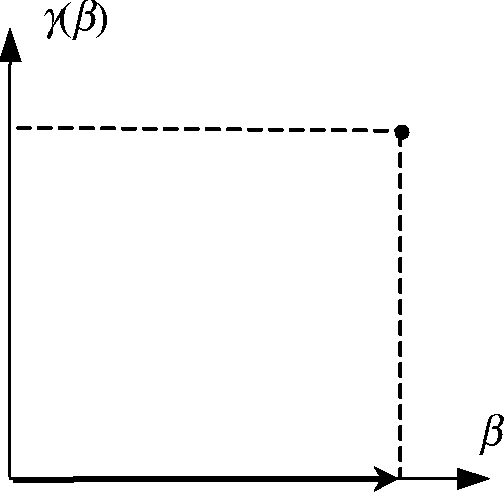
Во-вторых, это - аккордная оплата, при которой вся сумма договора C выплачивается только в момент полного завершения работ (см. рисунок 47).
В-третьих, это a-процентная предоплата (a е [0; 7]), при которой сумма a C выплачивается в момент начала работ, а сумма (7 - a) C - в момент полного завершения работ (см. рисунок 48).
Возможны и другие варианты - любой определенной на отрезке [0; 7] измеримой функции соответствует некоторая шкала оплаты труда. Например, на рисунке 49 приведена так называемая квартильная оплата, при которой за четверть объема работ выплачивается четверть стоимости договора. На рисунках 50-52 приведены, соответственно, варианты выпуклых шкал, вогнутых шкал и шкал с перегибом.
ИР)
s(b)
7

0
7
7
0
b
Рис. 46. Равномерная шкала
0
sb)
йф-7)С
> У
b
7
70
Рис. 47. Аккордная оплата<
br />7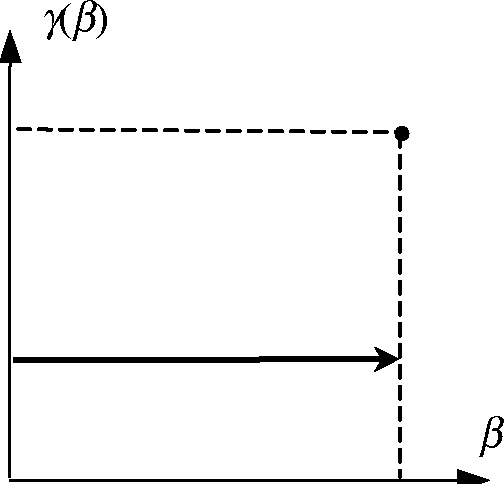
0
sb)
8ф-7)(7-а)С
8{р)аС
b
7 0 7
Рис. 48. a-процентная предоплата
3/4 1/2 1/4

0 1/4 1/2 3/4 1
о(Р)
8(Р-М)С/4, i= 1,4
Р
К /У > к
0 1/4 1/2 3/4 1
Рис.
49. Квартильная оплатаР
1
о(Р)
1

1
0
0
Рис. 50. Выпуклая шкала


Рис. 51. Вогнутая шкала

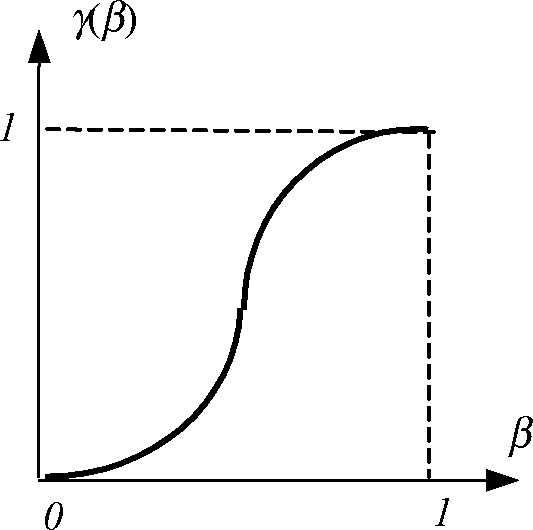
Рис. 52. Шкала с перегибом
Введем действие y(t) агента в момент времени t > 0, характеризующее объем работ, выполняемый им в единицу времени в момент времени t > 0. Функцию y( ) назовем траекторией. Очевидно, что время T = T(y(-)) завершения работы можно определить как минимальное время, такое, что T (y (¦))
(4) J y(t )dt = 1.
о
При заданной траектории y() можно определить зависимость процента завершения от времени:
b(t, y( )) = J y(t)dt.
о
Из (5) следует, что p(0) = 0, fi(T(y( )) = 1.
Имея шкалу g(b) и зная зависимость (5) процента завершения от времени, можно найти зависимость от траектории и времени величины процента завершения:
g(t, y( )) = libit, y( )))
и зависимость от траектории и времени размера вознаграждения, получаемого агентом:
c(t. y( )) = С ^O) .
dp
Отметим, что в каждый «момент» p агент чувствует себя тем уверенней, чем большая доля вознаграждения ему уже выплачена.
При этом невыплаченная часть вознаграждения может рассматриваться как характеристика риска с точки зрения агента.Введем функции дохода центра H(t, p) и затрат агента c(t, y), а также показатели дисконтирования Хо и X, отражающие степень учета будущего, соответственно, центром и агентом.
Теперь имеется все необходимое для того, чтобы сформулировать теоретико-игровую задачу управления.
Стратегией центра является выбор стоимости работ С > 0 и шкалы оплаты труда g(b) из множества функций, удовлетворяющих введенным выше требованиям. Он выбирает ее и сообщает агенту, стратегией которого является выбор траектории y(-), при-надлежащей множеству положительнозначных кусочно- непрерывных функций. Агент выбирает траекторию, которая в соответствии с выражениями (4)-(7) определяет продолжительность работ, динамику процента завершения и выплат. Целью центра является максимизация дисконтированной разности между доходом и выплатами агенту: т (y (¦))
f [H (t, b (t, y())) - ^(t, y())] dt ® max,
0 /(¦). С
при условии, что агент (при известных ему стоимости работ и шкале) выбирает траекторию, максимизирующую дисконтирован-
ную разность между вознаграждением, получаемым от центра, и своими затратами:
т(у(-))
f [о-(t, у(-)) - c(t, у(-))] dt ® max,
о у(0
Задачу (8)-(9) назовем задачей выбора шкалы оплаты труда. Приведем решение этой задачи для различных частных случаев (на сегодняшний день общих методов решения задачи (8)-(9) не известно).
Начнем с простейшего случая, соответствующего, статической задаче стимулирования, то есть будем считать, что объем работ у > 0, выполняемый агентом в единицу времени, постоянен, функции дохода Н(у) и затрат с(у) не зависят от времени, дисконтирование отсутствует. Соответствующую задачу назовем квазидинамической.
Если центр использует шкалу Xb), то из (1)-(7) следует, что: Т(у) = 1 /у, b(t, у) = у t, g(t, у) = Ху t), o(t, у) = C /(у t). Следовательно, задача (8)-(9) выбора шкалы оплаты труда в рассматриваемом (квазидинамическом) случае примет вид:
[H (у) / у - C ® max
\\ C ( ч/ ® C>0 ,
C - с(у) / у ® max
L у> 0
при ограничениях участия, которое отражают выгодность взаимодействия центра и агента (не вступая во взаимодействие друг с другом, и центр, и агент могут получить нулевую полезность):
di) lH w/ у- C>0.
\'1C - с(у)/у > 0 Обратим внимание на то, что выражения (10) и (11) не зависят от шкалы g().
Поэтому решение задачи (10)-(11) тривиально. Обозначиму mm = arg min с(у) / у.
у>0
Тогда, если
Н(утпг) ^ С(утпг), то
C с(ут1п) /утп
иначе центру и агенту взаимодействовать невыгодно .
В [2] доказано, что в квазидинамической задаче поиска шкалы оплаты труда при выполнении условия участия (13) оптимальное решение (12), (14) не зависит от шкалы и функции дохода центра. Содержательно это утверждение означает, что в квазидинамическом случае все шкалы оплаты труда эквивалентны, поэтому рассмотрим более общий случай.
Введем «техническое» предположение (которое имеет прозрачные содержательные интерпретации). А именно, предположим, что функция затрат непрерывна и lim c(x) / x = ?
В [2] доказано, что если функции дохода и затрат не зависят от времени и дисконтирование отсутствует, то для любой траектории y() агента найдется постоянное его действие xy(), обеспечивающее ему ту же полезность.
Действительно, в рассматриваемых условиях целевая функция агента примет вид:
T (y(¦)) t
J [C/(Jy(t)dt) - c(y(t))]dt,
о о
следовательно, в силу непрерывности функции затрат, найдется xy() > 0, такой что:
т (y(¦))
(15) c(xy(0) / xy(0 = J c(y(t))dt.
о
Условие (15) позволяет вычислить постоянное действие агента xy(), обеспечивающее ему (при произвольной шкале!) ту же полезность, что и траектория y().
Из приведенных рассуждений следует, что при любой фиксированной сумме договора и выполнении условия участия (13) агент выберет действие (12). Значит, следствием является тот факт, что в рамках введенных предположений при решении задачи выбора шкалы оплаты труда можно ограничиться классом постоянных траекторий (то есть классом квазидинамических задач).
Таким образом, если функции дохода и затрат не зависят от времени и дисконтирование отсутствует, то все шкалы оплаты труда эквивалентны.
Очевидно, различие эффективностей шкал проявится, если ввести дисконтирование и зависимость от времени доходов и затрат. Исследование подобных моделей (то есть общей постановки задачи (8)-(9)), в том числе, с учетом риска, представляется перспективным направлением дальнейших исследований.