5. ОПИСАНИЕ БАЗОВЫХ СИСТЕМ СТИМУЛИРОВАНИЯ
Скачкообразные системы стимулирования (С-типа) характе-ризуются тем, что агент получает постоянное вознаграждение (равное заранее установленному значению C), при условии, что выбранное им действие не меньше заданного, и нулевое вознаграждение, при выборе меньших действий (см.
рисунок 12):\\C,y > х (1) <с(х,У) = \\ 0 < .
I 0,y < х
Параметр х е X называется планом - желательным с точки зрения центра состоянием (действием, результатом деятельности и т.д.) агента.
Системы стимулирования С-типа могут интерпретироваться как аккордные, соответствующие фиксированному вознаграждению при заданном результате (например, объеме работ не ниже оговоренного заранее, времени и т.д. - см. ниже более подробно). Другая содержательная интерпретация соответствует случаю, когда действием агента является количество отработанных часов, то есть, вознаграждение соответствует, например, фиксированному окладу без каких либо надбавок и оценки качества деятельности.
sc(x,y)
C
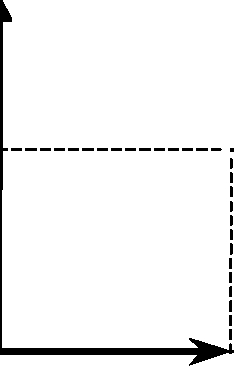
0
х
-+У
Рис. 12. Скачкообразная система стимулирования
Величины, соответствующие системам стимулирования С- типа, будем индексировать «С», например MC - множество скачкообразных систем стимулирования и т.д.
Отметим, что большинство базовых систем стимулирования являются параметрическими, например, класс MC сM определяется заданием, помимо (1), множества допустимых планов X (отно-сительно которого обычно предполагают, что оно совпадает с множеством допустимых действий агента: X = A, или с множеством действий PM, реализуемых при заданных ограничениях механизма стимулирования).